无人机要实现长航时巡飞、能效优化与安全避险,核心前提之一是对周围湍流风场具备精细的感知能力。高分辨率欧拉流场信息可支撑模型预测控制与自适应控制等全局路径规划策略,使无人机更有效地识别并利用上升气流等有利结构,从而提升能效并延长续航。然而受限于载荷、功耗与传感器布设成本,全场测量往往昂贵且难以实现,因此实际中往往只能获得单条拉格朗日轨迹及其沿途观测。由此带来关键科学问题在于,能否从稀疏的拉格朗日信息中准确重建周围欧拉流场。
近日,西工大航空学院/极端力学研究院徐翱等人提出Track-to-Flow(T2F)深度学习模型,采用编码器—解码器结构,以 Vision Transformer(ViT) 作为编码器,提取单条轨迹所携带的时空特征;以 CNN 作为解码器,将抽取到的高维表征映射为欧拉流场,实现从“轨迹”到“流场”的端到端重建。直观上,单条轨迹可被视为由局部流动片段拼接而成的“短视频”,从而充分发挥 Transformer 对长程依赖建模的优势。
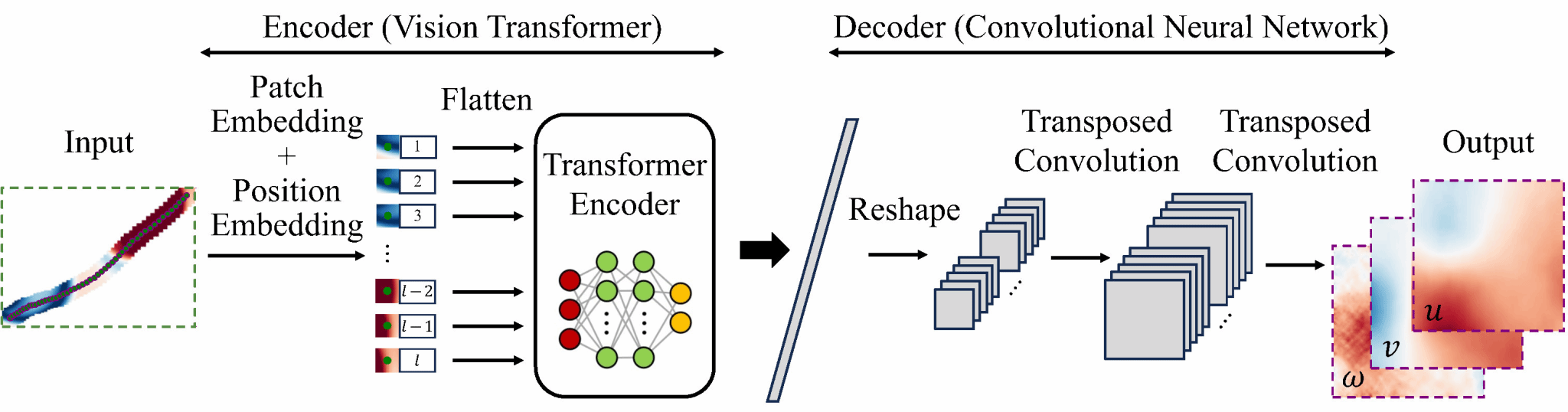
为增强重建的物理一致性,团队将受 Physics-Informed Neural Network(PINN)启发的物理损失项并入训练目标,形成 T2F+PINN模型。该模型的总损失由数据损失项与偏微分方程残差等物理一致性项加权构成,使得重建结果不仅贴近数据,也更符合方程约束。这一点对于涡量、温度梯度、Q 判据等导数量尤为关键,这是由于导数变量涉及空间导数,对局部光滑性与物理一致性更敏感,缺乏约束时更容易出现模糊与伪结构。
在应用层面,团队将该方法用于浮力驱动的湍流对流,该系统同时包含小尺度湍流拟序结构羽流及大尺度湍流拟序结构环流,是研究大气对流的典型范式系统。结果表明,T2F 已能较准确重建速度与温度等原始变量;引入物理一致性约束后,T2F+PINN 在导数变量上优势突出。
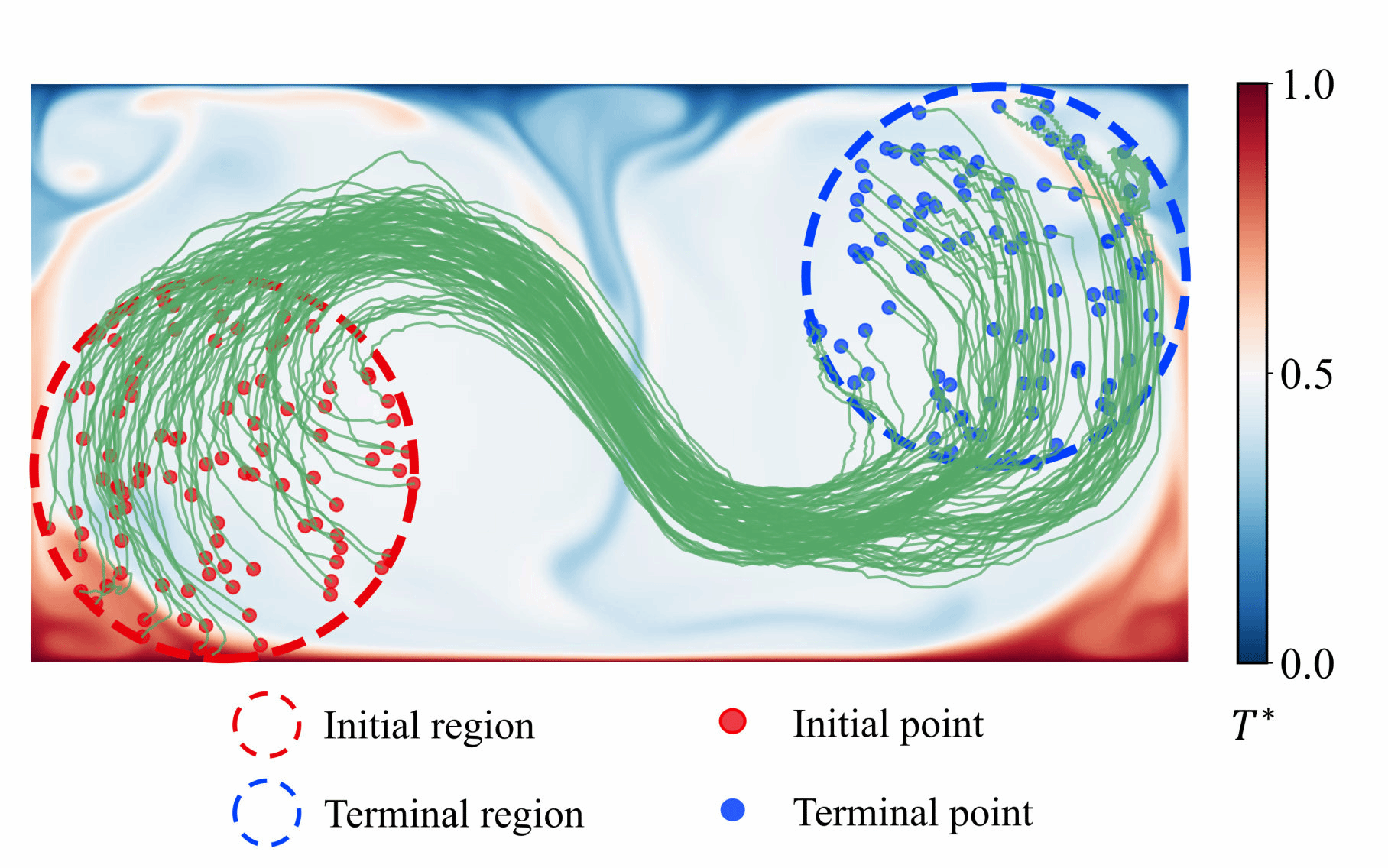
本研究展示了在传感器稀疏的条件下,仍可通过深度模型从单条轨迹推断高分辨率流场结构,为大气无人机的环境场推断、能效路径规划与风险规避提供了新的技术路线。进一步结合物理约束后,对涡量、温度梯度、Q 判据等机制敏感量的高可信重建,也为后续开展结构识别、极值事件捕捉与机理分析奠定基础。该研究成果以“Super-resolution reconstruction of turbulent flows from a single Lagrangian trajectory”为题发表于流体力学顶级期刊《Journal of Fluid Mechanics》。论文第一作者为博士生吴华林,通讯作者为徐翱副教授,合作者包括郗恒东教授。西北工业大学为该论文的唯一署名单位。该研究得到了国家自然科学基金、中国科协青年人才托举工程、飞行器复杂流动与控制学科创新引智基地的资助。
论文链接:https://doi.org/10.1017/jfm.2025.11033
(撰稿:吴华林,审核:郗恒东)